
The Autonomous Vehicle Challenge
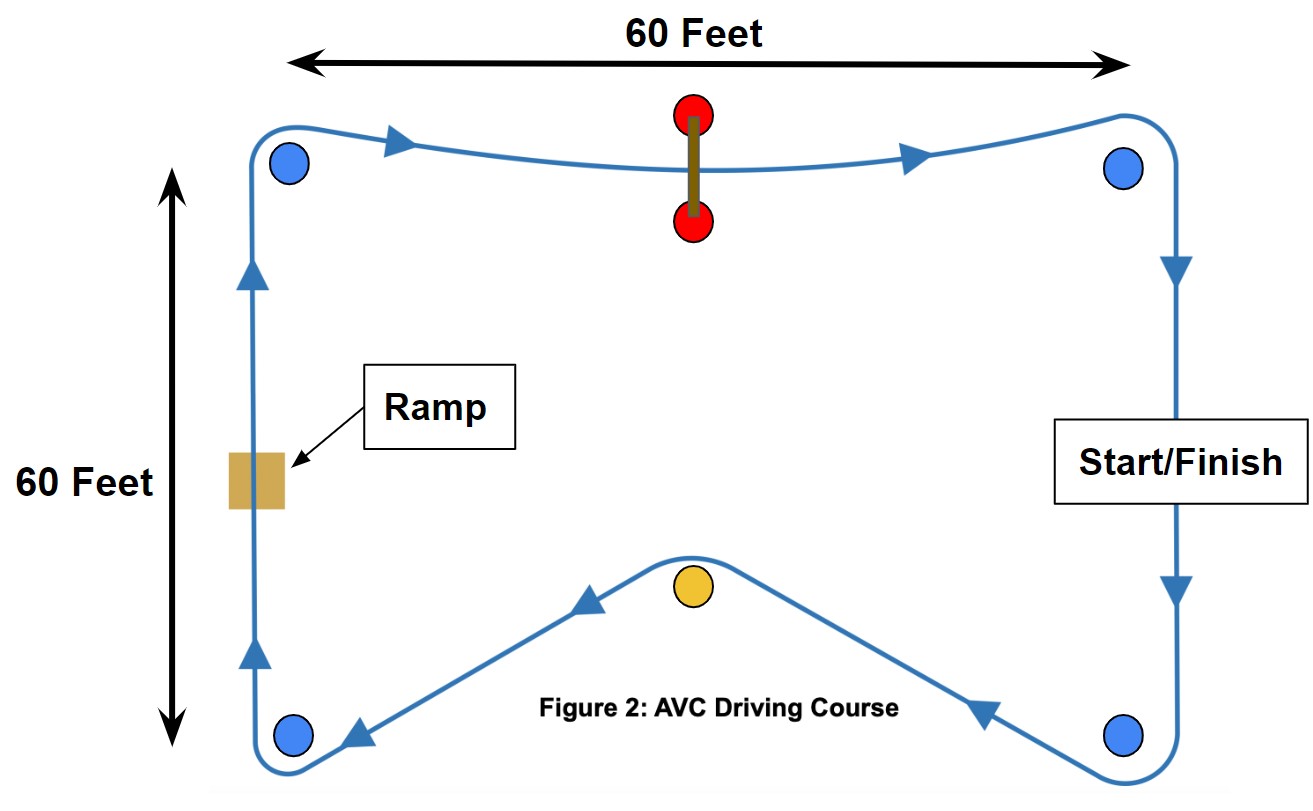
We competed in an autonomous vehicle challenge where our robot had to navigate through the obstacle course depicted above. Each team was free to design their robot’s hardware and software however they wished, as long as the robot was completely autonomous. We chose to modify an RC car, stripping out the existing electronics and installing motor drivers, servo control boards, batteries, and a Raspberry Pi to process camera images and control the robot.
Autopilot Design
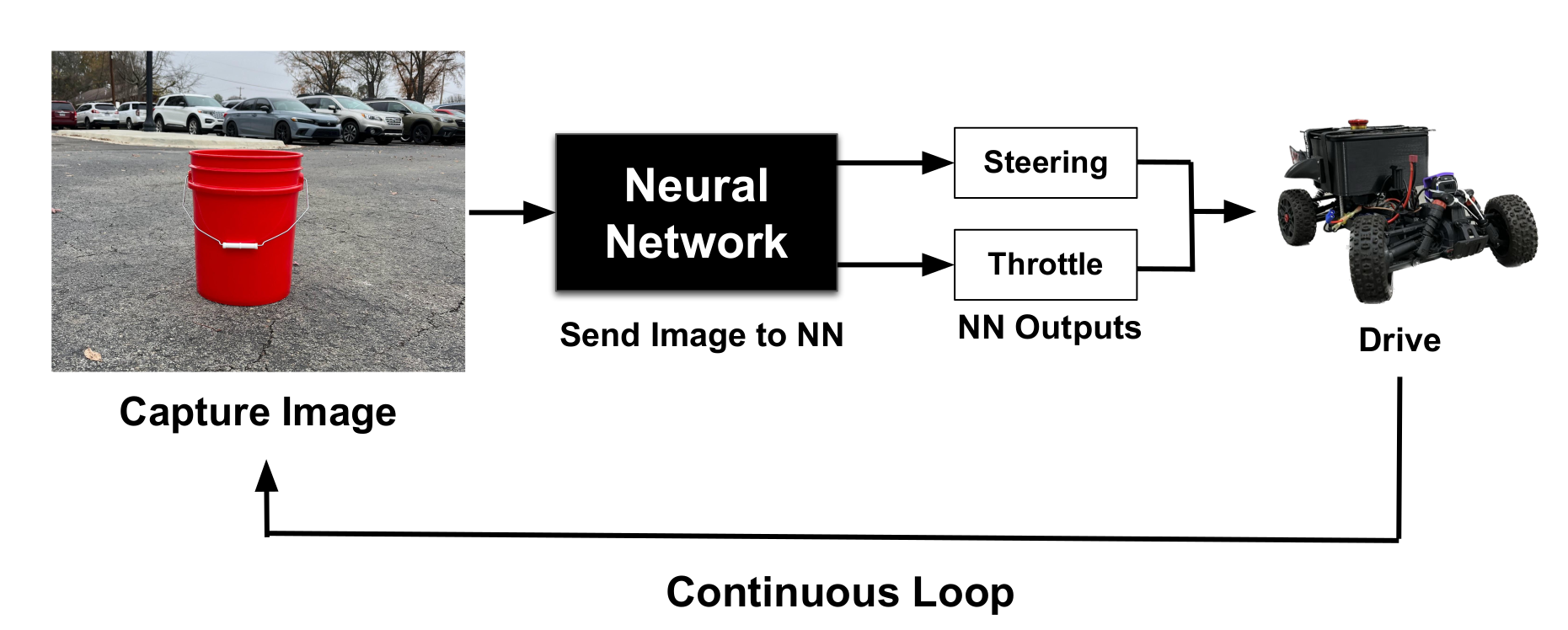
We chose a learning-based approach to designing our autonomy software. Our training and testing process is outlined below.
- Collect human driving data (camera images labeled with the user’s steering and throttle inputs).
- Train a Convolution Neural Network (CNN) to correctly predict control inputs based on input images.
- Deploy the CNN as the robot’s autopilot, processing images and outputting control actions in real time.
Results
We competed on this obstacle course at two competitions. At the first event, the obstacle course was outdoors and uncovered. The video above illustrates how sun exposure corrupted our robot’s camera images. As a result, our robot failed to complete the course. However, at the second event, the obstacle course was built on an outdoor, covered tennis court. Our robot performed much better under these lighting conditions, and our team won first place.
Technical Contributions
- Developed Python software that
- Records the robot’s sensor/control data (camera images, servos & motor control)
- Trains a neural network model to predict control actions from camera images (PyTorch)
- Drives the robot autonomously using the trained model as the controller
- Hardware integration (configuring driver boards, connecting sensors/devices to the RPi)
Additional Details
- Source code for training and deploying our autopilot: github.com/willward20/WHAM.
- Our team’s final presentation slides.