
Motivation
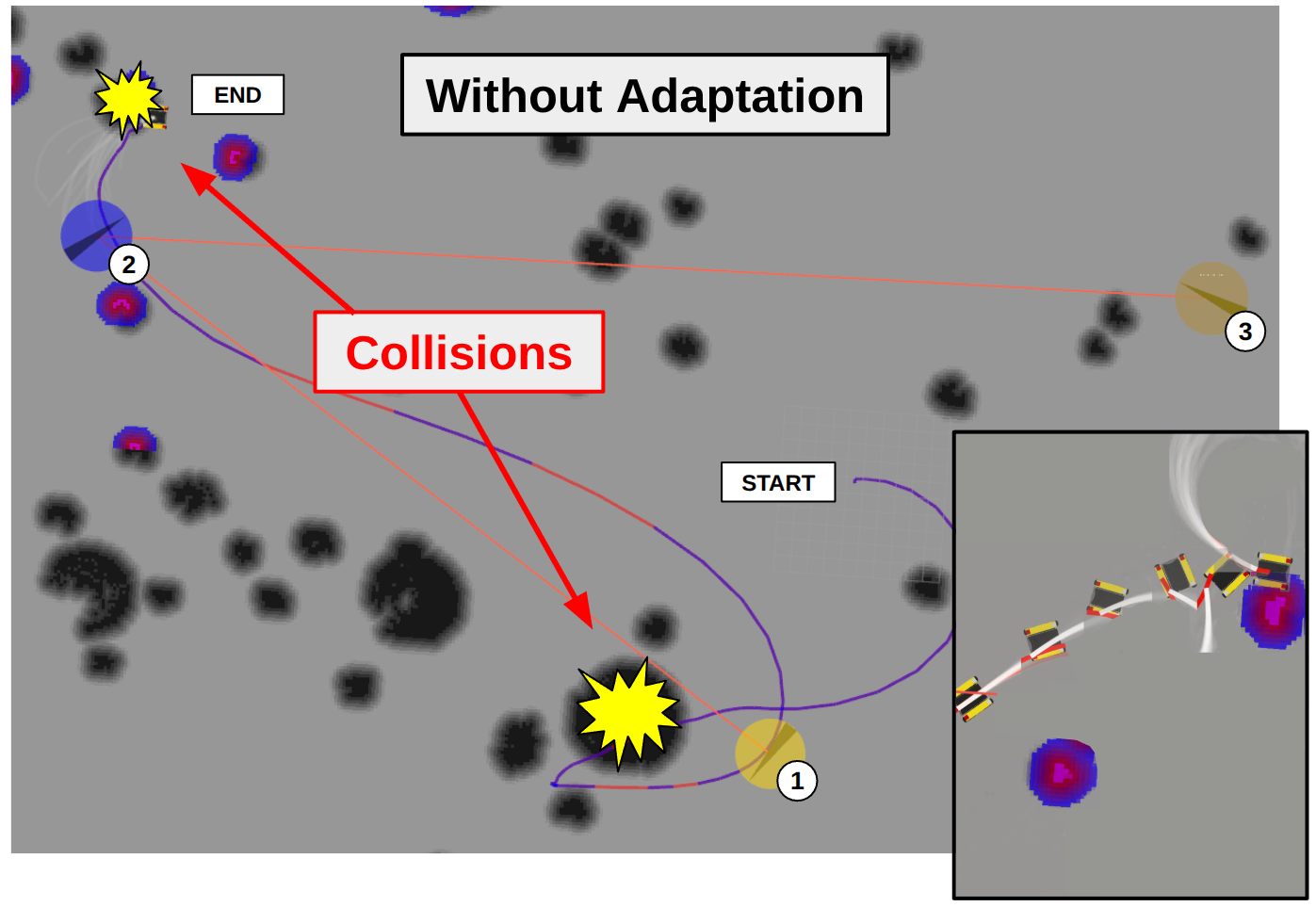
Mobile robots driving in off-road environments face rapidly changing terrain conditions that affect their motion and control. Traditional models often fail when encountering new or unseen surfaces, leading to poor performance or collisions. Therefore, real-time adaptation is critical for safe and reliable navigation.
Overall Framework
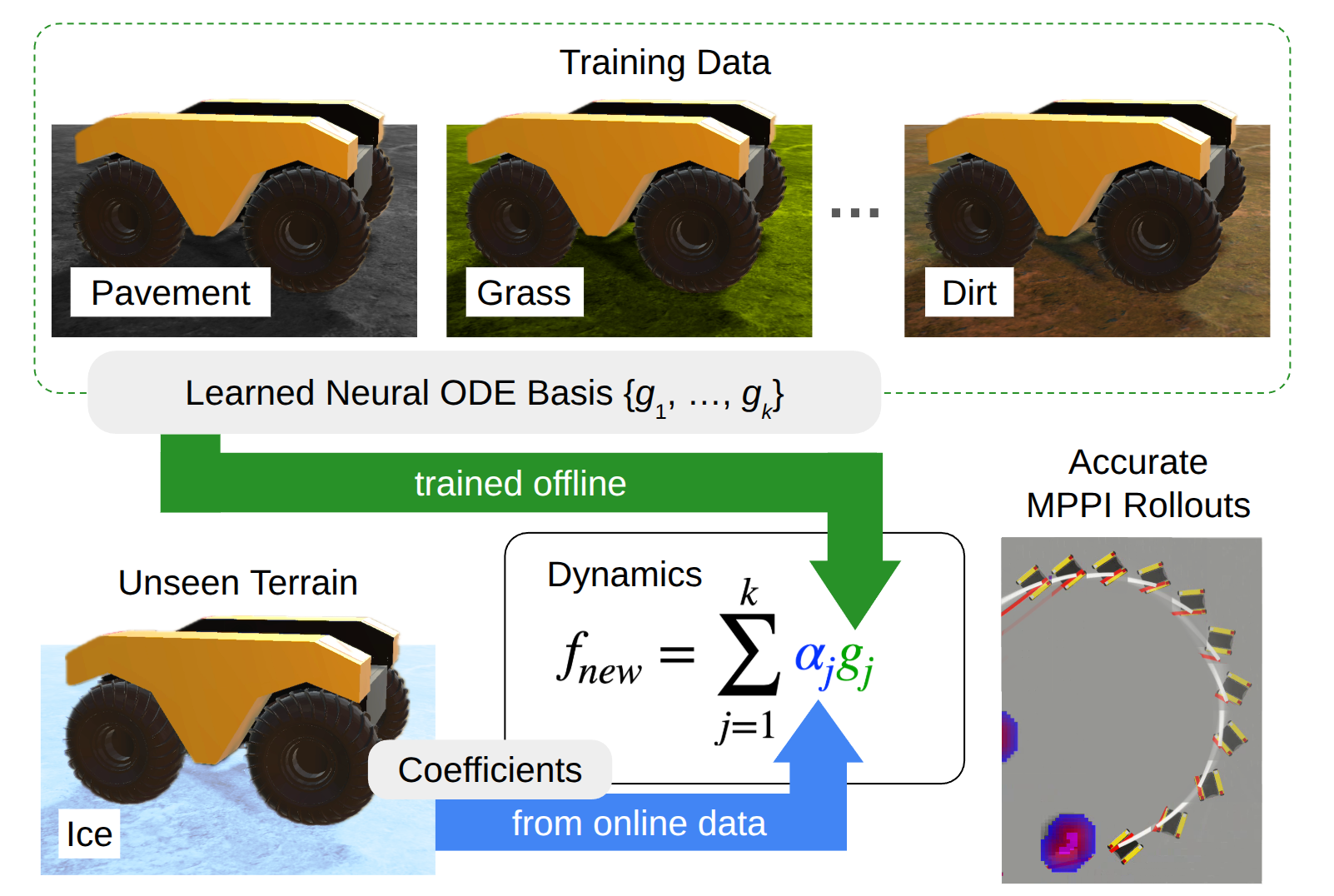
- Offline: Train a function encoder (set of neural networks) to capture a robot’s driving dynamics on known terrains.
- Online: Align the function encoder to represent the dynamcis of a new terrain using a simple least-squares algorithm.
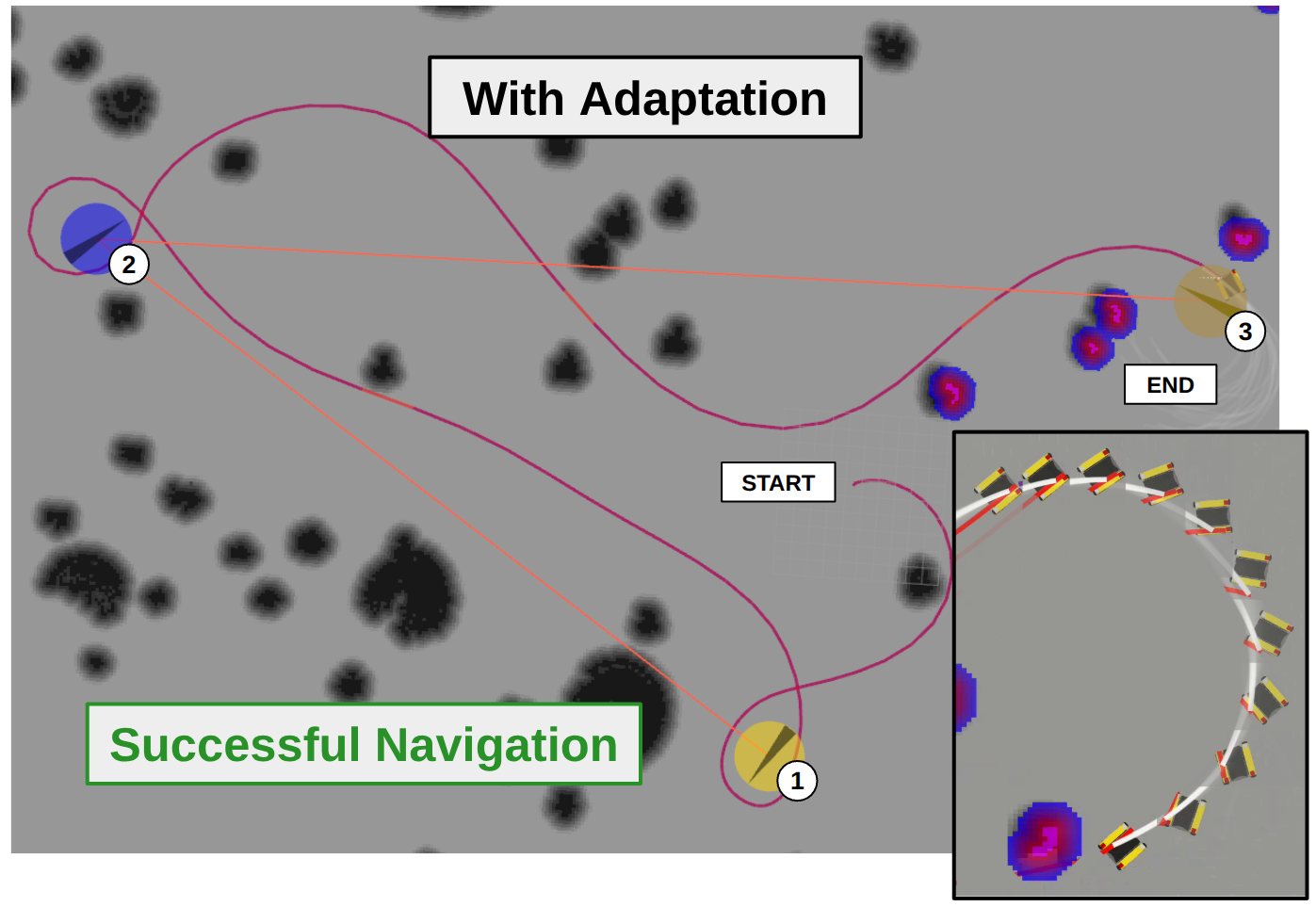
Successful Adaptation to Challenging Ice Terrain
- We train a function encoder on driving data from a Unity simulation.
- At runtime, the function encoder successfully adapts to a challenging, unknown icy terrain.
- The robot uses MPPI control to navigate on the ice, reaching waypoint goals while avoiding trees.
Technical Contributions
- Trained neural network dynamics models that accurately predict a robot’s control response (PyTorch).
- Integrated neural network dynamics models with an MPPI control algorthim for rapid trajectory planning (ROS).
- Collected and processed robot trajectory data (odometry and command velocities) from a Unity-based simulator (ROS).
Publication
W. Ward, S. Etter, T. Ingebrand, C. Ellis, A. J. Thorpe, U. Topcu, “Online Adaptation of Terrain-Aware Dynamics for Planning in Unstructured Environments,” RSS Workshop on Resilient Off-road Autonomous Robotics (2025).
Additional Details
- Poster presented at RSS Workshop on Resilient Off-road Autonomous Robotics: Poster
- ROS package for calculating MPPI rollouts using the learned model: github.com/willward20/mppi_rollouts.
- Function encoder training/testing software: github.com/ajthor/function-encoder-terrain-adaptation.