
Motivation
Sudden dynamics shifts, like moving from pavement to ice, can destablilize robot control unless the model updates in real time. Our system adapts to terrain changes online within seconds, maintaining MPC accuracy, even on extremely slippery terrain.
Overall Framework
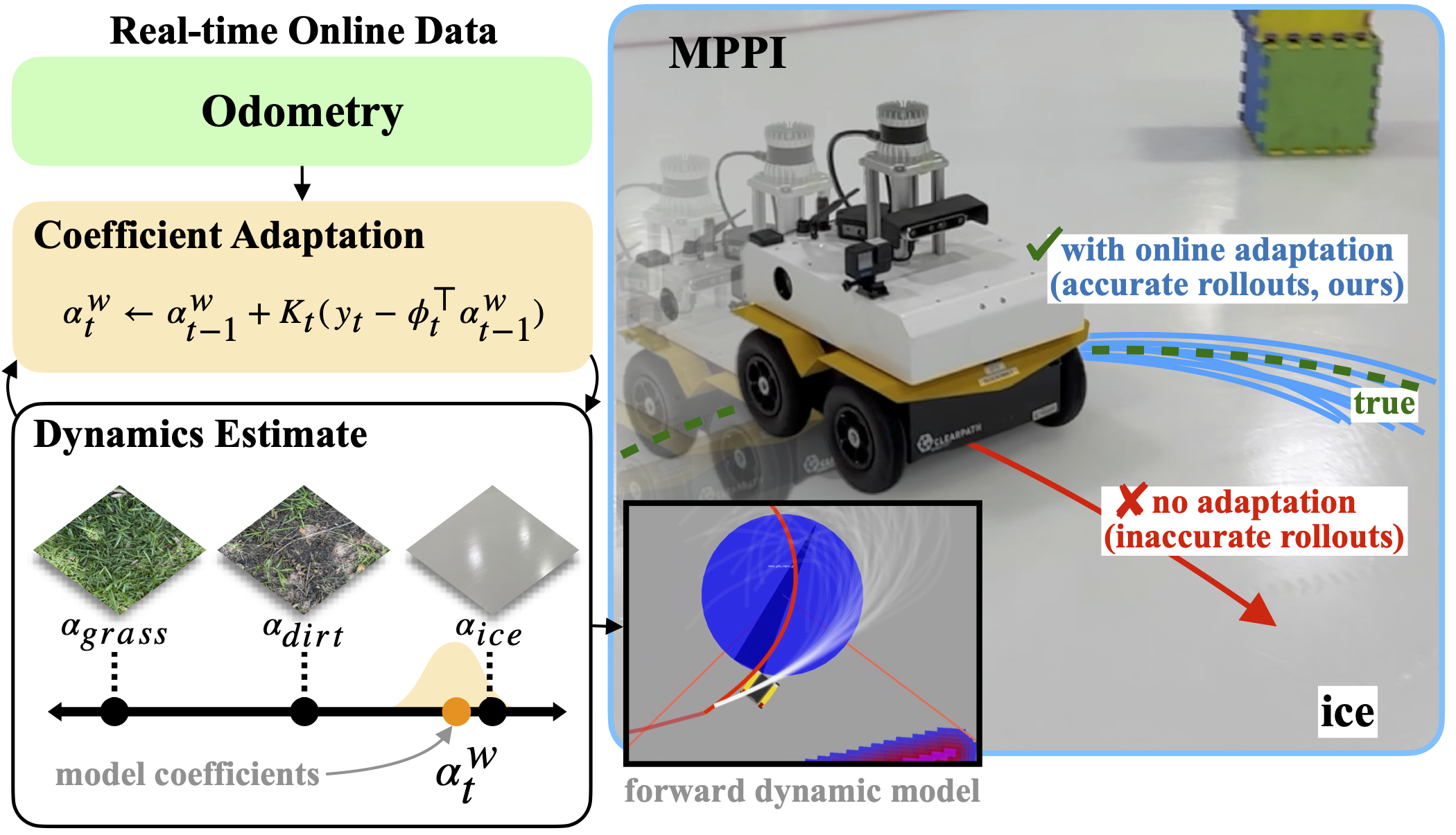
Model adapatation and model-predictive control occur simultaneously.
- Adaptation: Our method updates the robot’s dynamics model in real time using live sensor data.
- Control: MPPI controls the robot using trajectory rollouts generated by the latest adapted model.
Results

Technical Contributions
- Developed real-time coefficient updates for neural network dynamics models.
- Planned and directed robot autonomy experiments at a local ice-skating rink.
- Integrated neural network dynamics models with MPPI control on-board hardware robots.
Publication (Under Review)
W. Ward, S. Etter, J. Quattrociocchi, C. Ellis, A. J. Thorpe, U. Topcu, “Zero to Autonomy in Real-Time: Online Adaptation of Dynamics in Unstructured Environments,” Under review for ICRA 2026.
Additional Details
- ROS package for deploying dynamics adaptation software in simulation and on hardware: github.com/willward20/mppi_rollouts.
- Model training and evaluation software: https://github.com/willward20/terrain-adaptation-rls.