
Motivation
Robots that interact with humans must be able to anticipate and understand their behavior. For example, a robot delivering medical supplies throughout a hospital must be able to predict the flow of human traffic to avoid collisions and deliver on time. However, in many scenarios, humans don’t expliclty reveal their objectives, and they may even intentionally hide them. How can robots understand the behavior of humans who do not voluntarily share their goals?
Results
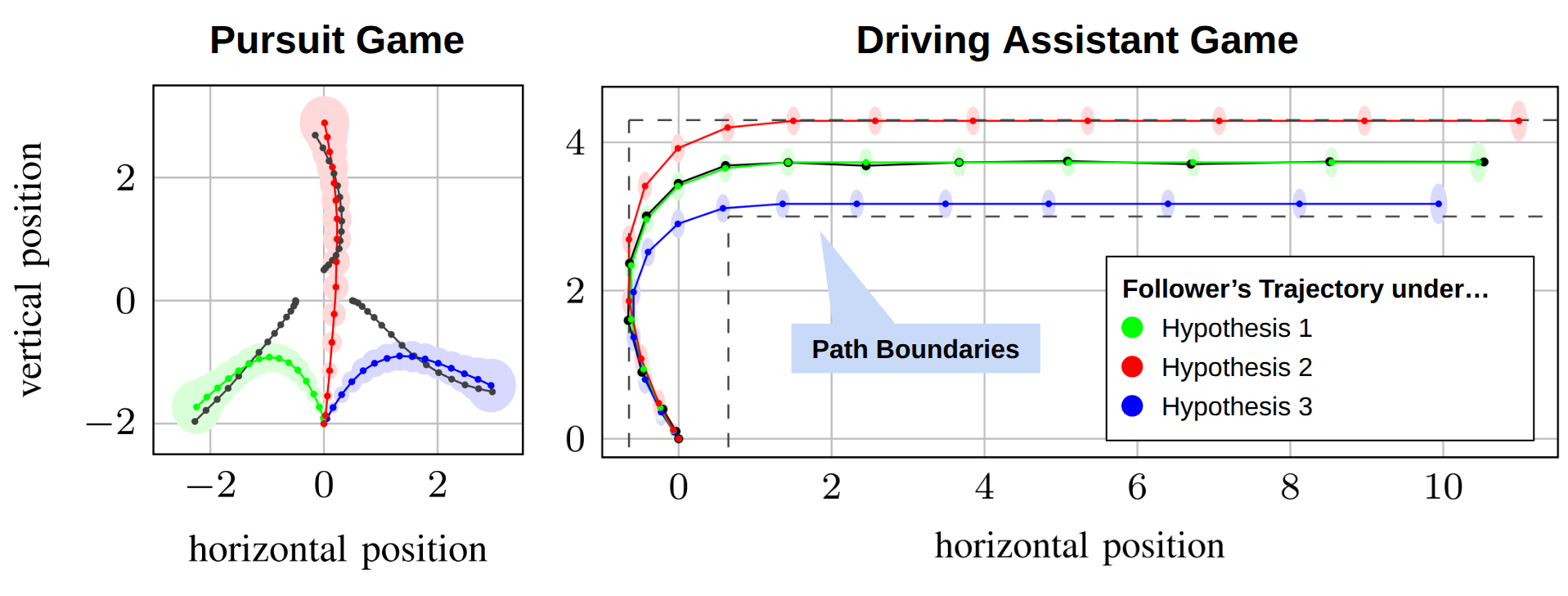
- We test our method in two scenarios: a pursuit game and a driving assistant game.
- Pursuit: Follower (human) pursues one the leader’s (robot’s) three rovers.
- Driving Assistant: Follower drives through a warehouse, tracking a trajectory suggested by the leader (a driving assistant).
- Across both scenarios, the leader plans control actions that clearly distinguish the follower’s trajectories under each of its possible objectives.
- The video above visualizes the follower’s trajectories under each of its possible objectives in Gazebo.
- The colored distributions on the ground show where the leader expects the follower to drive, depending on its objective (red, green, or blue).
Technical Contributions
- Solved optimization problems in Julia using the convex-concave procedure and the MOSEK solver.
- Designed game-theoretic optimization problems for actively distinguishing follower objectives.
- Integrated Julia code with a Julia-to-ROS communication port for deploying trajectories on rovers.
- Created a ROS/Gazebo simulation to deploy the optimized trajectories on TurtleBots.
Publication
W. Ward, Y. Yu, J. Levy, N. Mehr, D. Fridovich-Keil, U. Topcu, “Active Inverse Learning in Stackelberg Trajectory Games,” American Control Conference (2025).
Additional Details
- ROS package for deploying optimized trajectories on turtlebots in Gazebo: github.com/willward20/active_inverse_stackelberg_ros.
- Optimization code (Julia) for solving robot trajectories in Stackelberg games: github.com/u-t-autonomous/active_inverse_stackelberg.